Design
There are many ways to design a line following robot, but we will only be discussing one of them.
Assumptions made:
- only 2 sensors are being used to detect the presence of the black line
- the distance between the 2 sensors are fixed and can't be changed during operation
- the robot has 2 motor-powered wheels For our implementation, the 2 sensors we have chosen are Light Dependent Resistors (LDRs). By shining a light on the ground using an array of Light Emitting Diodes (LEDs), the resistance of the LDRs, when pointed towards the floor, vary with the light level reflected back to it. The black strip will reflect less light compared to the white floor, allowing us to differentiate between the two.
The method we have chosen involves 3 different scenarios:
- robot is on the center of the line
- robot is on the left edge of the line
- robot is on the right edge of the line
- robot is at a checkpoint
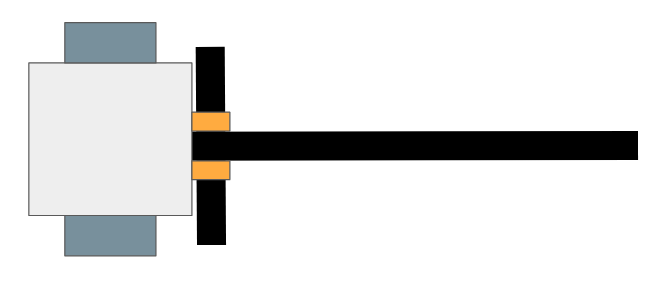
We will refer to any straight black line perpendicular to the path as a checkpoint
Truth table
Based on these scenarios, we can create a psuedo-truth table to determine the different states the robot.
| leftLDR | rightLDR | robotState |
|---|---|---|
| white | white | center of line |
| white | black | left of line |
| black | white | right of line |
| black | black | at checkpoint |
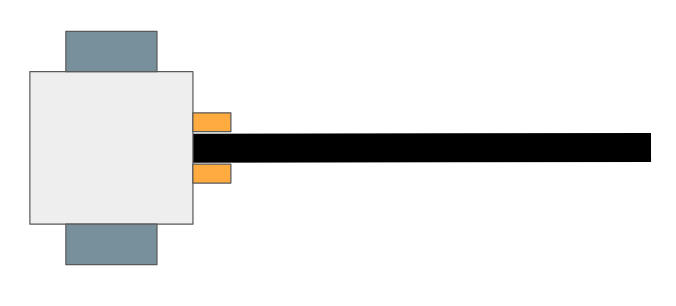
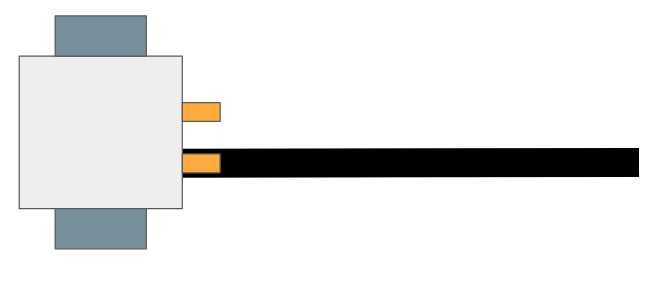
To help with visualising the different robot states, refer to the diagrams below:
Center
Left
Right

Checkpoint
Method
From the above truth table, we can determine a possible method to approach this problem.
- When the robot is on the left edge, keep following it
- When the robot is on the right edge, keep following it
- When the robot is at a checkpoint, skip it by moving forward
- When the robot is in the center of the line, move towards the previous edge it was following
Try to think of other ways you could do this! The method being used here is a modification of the single sensor edge following method.
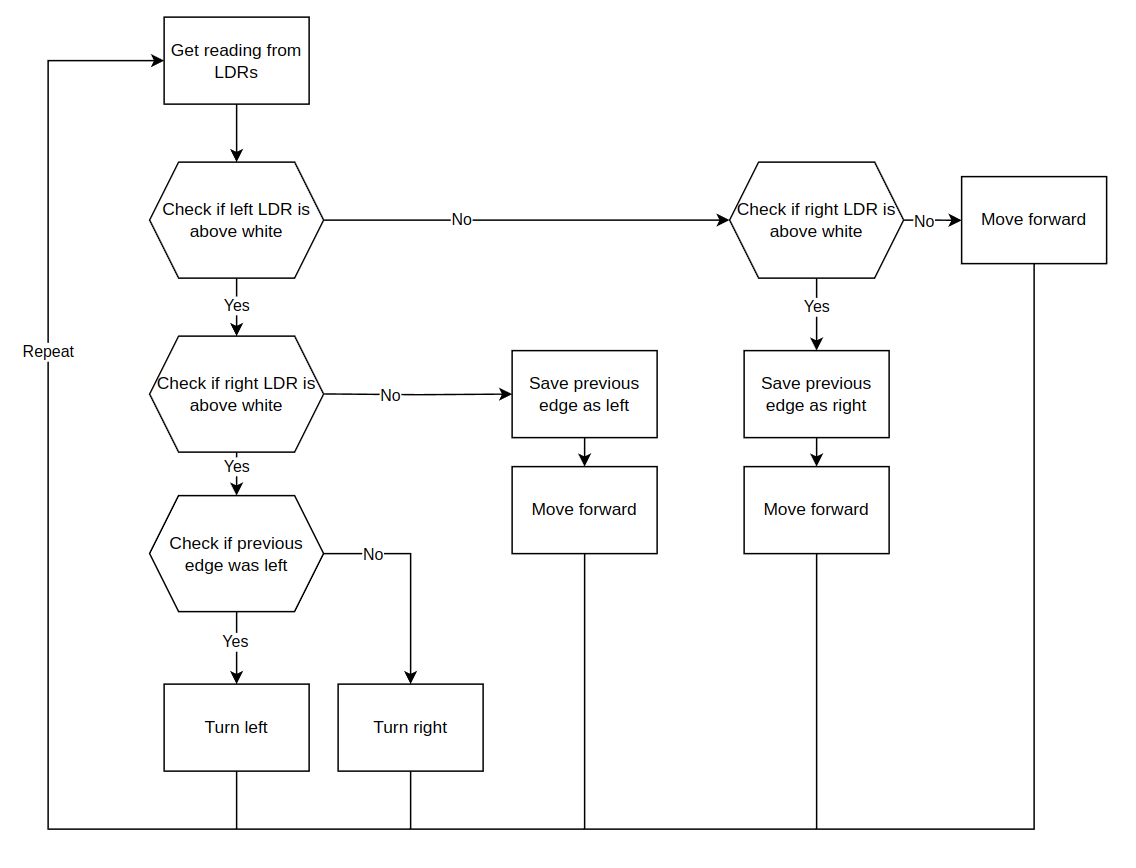
Flow chart
We can represent our method in terms of a flow chart. This is the closest representation we can have to the actual code without writing any.
Example Code
The following is the code implementation of the method discussed. Take some time to go over each line of the code. If you get lost, compare it to the diagrams above.
void loop() {
int readingl, readingr;
readingl = analogRead(L_LDR_PIN);
readingr = analogRead(R_LDR_PIN);
if (readingl <= WHITE_THRESHOLD){
if (readingr <= WHITE_THRESHOLD){
//both left and white LDRs are currently in the white
//check what previous edge was
if (previous_edge == left_edge){
turn_right();
} else if (previous_edge == right_edge){
turn_left();
}
} else {
//left side is in white, right side is in black
previous_edge = left_edge;
move_forward();
}
} else if (readingr <= WHITE_THRESHOLD) {
//left side is black, right side is white
previous_edge = right_edge;
move_forward();
} else {
//both left and right side is in black, checkpoint?
move_forward();
}
delay(10);
}